Project description:
System składa się z kamery uEye oraz komputera przemysłowego z dedykowanym oprogramowaniem.
Aplikacja ma budowę modułową:
- Moduł Akwizycji Obrazu – pozwala na wykonanie obrazu obszaru roboczego i korekcję zgodnie z wprowadzonymi ustawieniami kalibracyjnymi
- Moduł CAD – pozwala na zaprojektowanie obróbki na obrazie detalu lub dopasowanie gotowej trajektorii obróbki do detalu np. posiadamy ścieżkę obróbki, wkładamy detal w dowolny sposób do maszyny (brak konieczności pozycjonowania) – trajektoria obróbki dopasowuje się do ułożenia detalu w polu roboczym
- Moduł CAM – pozwala na wygenerowanie trajektorii obróbki dla maszyny
- Moduł Symulacji Obróbki – pozwala na przesymulowanie wykonanej obróbki i sprawdzenie czasu obróbki
- Moduł Strategii Obróbki – zawiera bazę parametrów obróbki dla poszczególnych detali oraz materiałów
Kalibracja systemu wykonywana jest z wykorzystaniem wzorca kalibracyjnego w postaci szachownicy. Dokładność uzyskana w aplikacji wynosi 100 μm. Jest ona zależna od budowy układu optycznego oraz matrycy kamery i na potrzeby innych systemów może być modyfikowana.

System współpracuje z głowicą do laserowej obróbki zdalnej. Usprawnia obróbkę eliminując konieczność pozycjonowania detalu w polu obróbki.
Zakres realizacji Robotize:
- wykonanie modułu CAD i CAM bazującego na Oprogramowaniu OpenSource (C++, Qt, Boost)
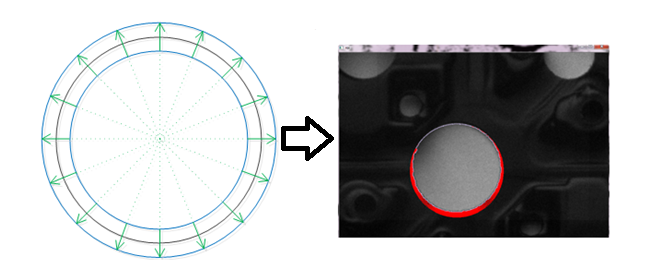
- oprogramowanie systemu wizyjnego opartego na kamerach uEye (C++, OpenCV)
- wykonanie modułu symulacji obróbki
- wykonanie bazy danych strategii obróbki (SQL)
- dobór parametrów technologicznych dla laserowej obróbki zdalnej
- dobór i obliczenia hardware systemu wizyjnego (kamery, obiektywy, oświetlacze)